Uksang Yoo (유욱상)
Postdoctoral Researcher at UC Berkeley AUTOLab

I am a postdoctoral researcher with Prof. Ken Goldberg in the AUTOLab at UC Berkeley. I completed my Ph.D. at Carnegie Mellon University in the Robotics Institute (RI), where I was co-advised by Prof. Jean Oh and Prof. Jeffrey Ichnowski as a member of RI’s BIG lab and Momentum lab. I have also worked as a research scientist intern with the robot learning groups at Bosch AI (Summer 2025) and Meta (Fall 2025).
My research investigates how mechanics and physics-based models can enable generalizable learning for dexterous, contact-rich manipulation. In particular, I develop models of contact dynamics and deformation mechanics that provide strong inductive biases for robot learning. My work spans compliant and dexterous manipulation, learning from human demonstrations across embodiments through contact, tactile sensing, and reasoning about the continuous deformation of soft objects/robots during physical interaction.
This research draws on ideas from discrete differential geometry, machine learning, robotics, and soft-body mechanics, with the goal of deploying dexterous robotic systems reliably in the real world.
I received my B.Sc. in Mathematics (2020) and in Mechanical Engineering (2021) at the University of Texas at Austin, where I developed my interest in continuous deformations and continuum structure representation. My research is supported by the NSF Graduate Research Fellowship Program (GRFP).

news
| Jul 01, 2026 | I started as a postdoctoral researcher in the AUTOLab with Prof. Ken Goldberg at UC Berkeley! |
|---|---|
| Jun 10, 2026 | I’m co-organizing the RSS Semantic Reasoning and Goal Understanding in Robotics Workshop workshop! |
| Jun 02, 2026 | I presented our work on DYMO-Hair at ICRA 2026! |
| Jun 01, 2026 | I gave a talk at the ICRA 2026 CR2 workshop! |
| May 10, 2026 | Our work on A-SLIP was accepted to IROS 2026! |
| Jan 31, 2026 | Our paper on learning dynamics for robot-hair interactions was accepted to ICRA 2026! |
| Jan 15, 2026 | Our workshop on Real2Sim2Real was accepted to ICRA 2026! We look forward to your submissions |
| Oct 11, 2025 | I gave a rising star talk at the North East Robotics Symposium (NERC)! |
| Sep 29, 2025 | I presented our paper (Oral) at the Conference on Robot Learning (CoRL) on learning soft hand policies! Recording |
| Aug 30, 2025 | Our work on simultaneous vision-based shape estimation and tactile signal reconstruction got accepted to The International Journal of Robotics Research (IJRR)! |
selected publications
-
 VibeAct: Vibration to Actions for Contact-Rich Reactive Robot DexterityarXiv preprint arXiv:2606.27344, 2026
VibeAct: Vibration to Actions for Contact-Rich Reactive Robot DexterityarXiv preprint arXiv:2606.27344, 2026 -
 Functional Force-Aware Retargeting from Virtual Human Demos to Soft Robot PoliciesIn 2026 Robotics: Science and Systems (RSS) , 2026
Functional Force-Aware Retargeting from Virtual Human Demos to Soft Robot PoliciesIn 2026 Robotics: Science and Systems (RSS) , 2026 -
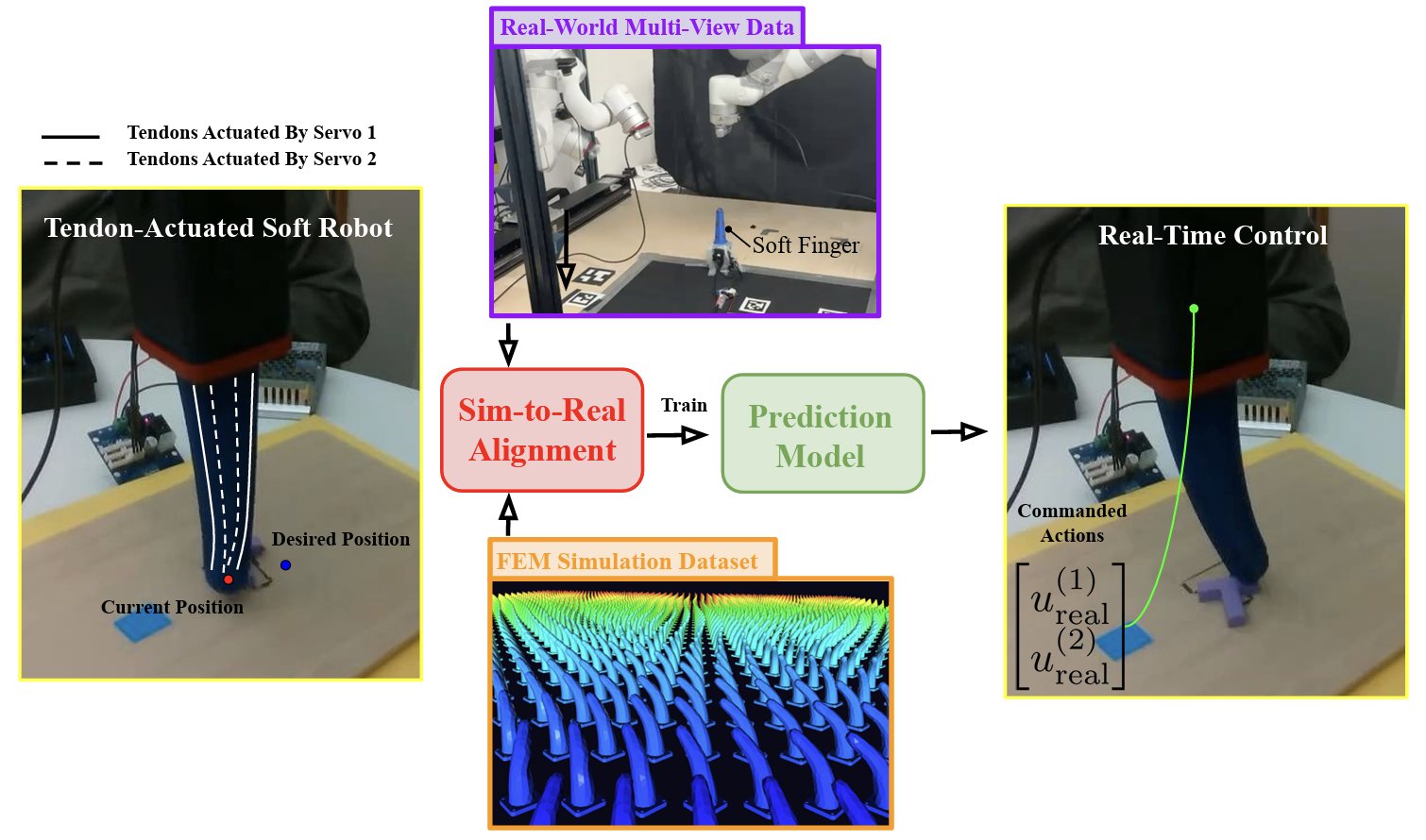 SOFTMAP: Sim2Real Soft Robot Forward Modeling via Topological Mesh Alignment and Physics PriorIn 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2026
SOFTMAP: Sim2Real Soft Robot Forward Modeling via Topological Mesh Alignment and Physics PriorIn 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2026 -
 A-SLIP: Acoustic Sensing for Continuous In-hand Slip EstimationIn 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2026
A-SLIP: Acoustic Sensing for Continuous In-hand Slip EstimationIn 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2026 -
 DYMO-Hair: Generalizable Volumetric Dynamics Modeling for Robot Hair ManipulationIn 2026 IEEE International Conference on Robotics and Automation (ICRA) , 2026
DYMO-Hair: Generalizable Volumetric Dynamics Modeling for Robot Hair ManipulationIn 2026 IEEE International Conference on Robotics and Automation (ICRA) , 2026 -
-
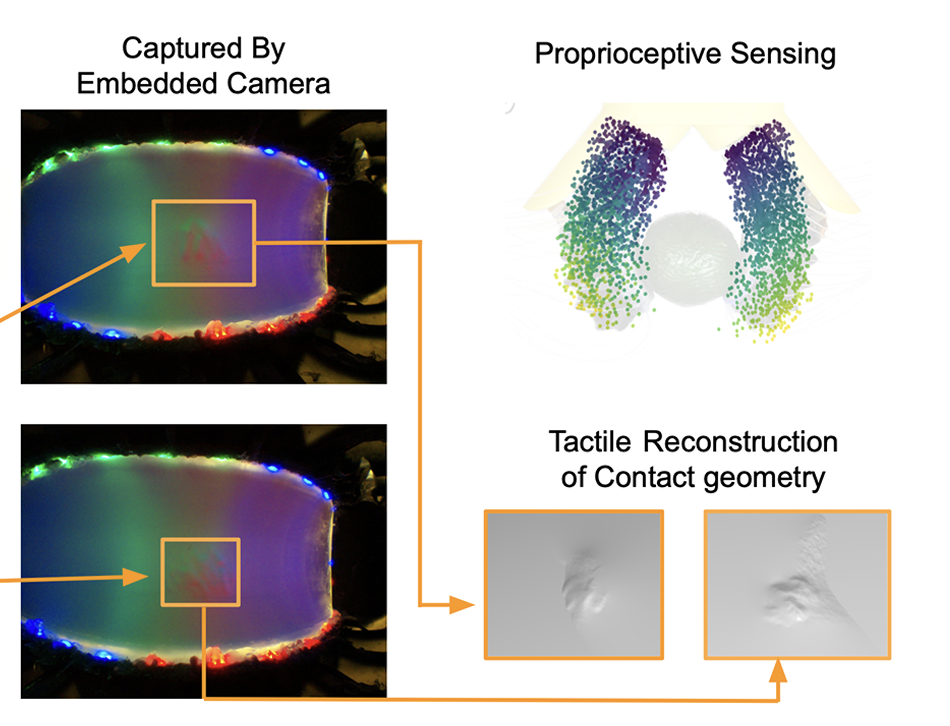 PneuGelSight: Soft Robotic Vision-Based Proprioception and Tactile SensingIn International Journal on Robotics Research (IJRR) , 2025
PneuGelSight: Soft Robotic Vision-Based Proprioception and Tactile SensingIn International Journal on Robotics Research (IJRR) , 2025 -
 SonicBoom: Contact Localization Using Array of MicrophonesIn IEEE robotics and automation letters , 2025
SonicBoom: Contact Localization Using Array of MicrophonesIn IEEE robotics and automation letters , 2025 -
 MOE-Touch More Deformation: Shape-Based Soft Robotic Contact Estimation for ManipulationIn [Under Review] , 2024
MOE-Touch More Deformation: Shape-Based Soft Robotic Contact Estimation for ManipulationIn [Under Review] , 2024 -
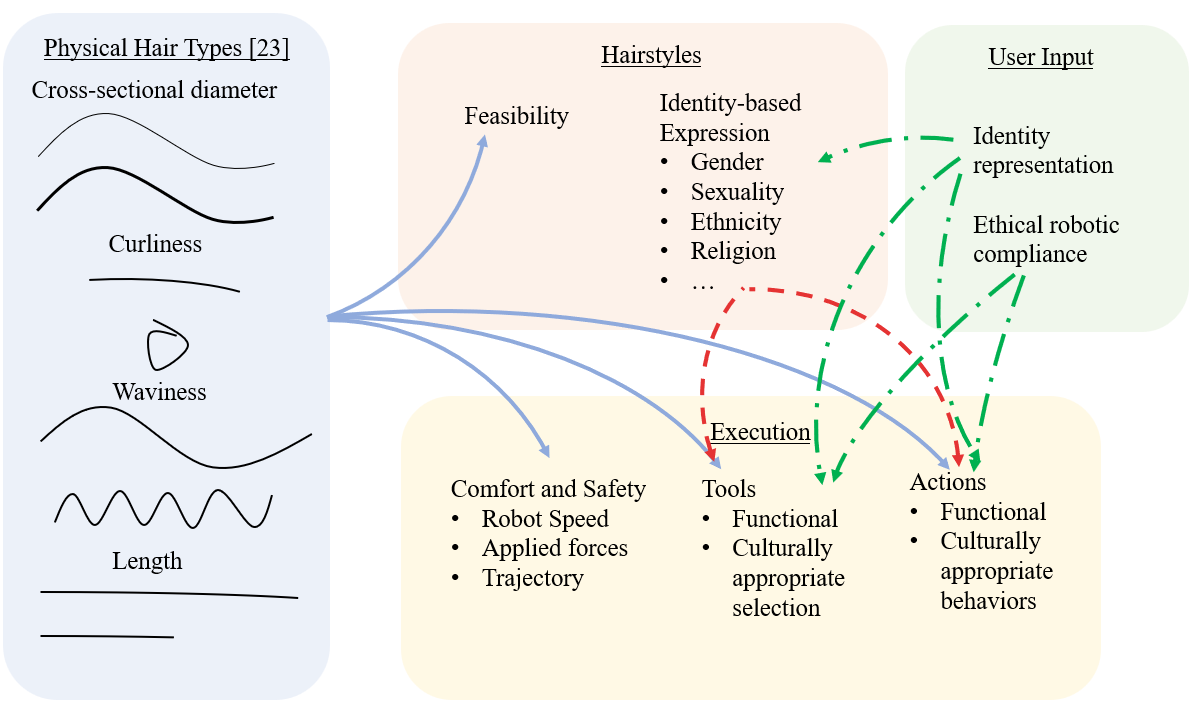 Inclusion in Assistive Haircare Robotics: Practical and Ethical Considerations in Hair ManipulationIn Third Workshop on Inclusive HRI , 2024
Inclusion in Assistive Haircare Robotics: Practical and Ethical Considerations in Hair ManipulationIn Third Workshop on Inclusive HRI , 2024 -
 MOE-Hair: Toward Soft and Compliant Contact-rich Hair Manipulation and Care [Best LBR at HRI 2024]In Late Breaking Report, International Conference on Human-Robot Interaction (HRI) , 2024[Best LBR]
MOE-Hair: Toward Soft and Compliant Contact-rich Hair Manipulation and Care [Best LBR at HRI 2024]In Late Breaking Report, International Conference on Human-Robot Interaction (HRI) , 2024[Best LBR] -
 POE: Acoustic Soft Robotic Proprioception for Omnidirectional End-effectorsIn 2024 IEEE International Conference on Robotics and Automation (ICRA) , 2024
POE: Acoustic Soft Robotic Proprioception for Omnidirectional End-effectorsIn 2024 IEEE International Conference on Robotics and Automation (ICRA) , 2024 -
 Toward Zero-Shot Sim-to-Real Transfer Learning for Pneumatic Soft Robot 3D Proprioceptive SensingIn 2023 IEEE International Conference on Robotics and Automation (ICRA) , 2023
Toward Zero-Shot Sim-to-Real Transfer Learning for Pneumatic Soft Robot 3D Proprioceptive SensingIn 2023 IEEE International Conference on Robotics and Automation (ICRA) , 2023 -
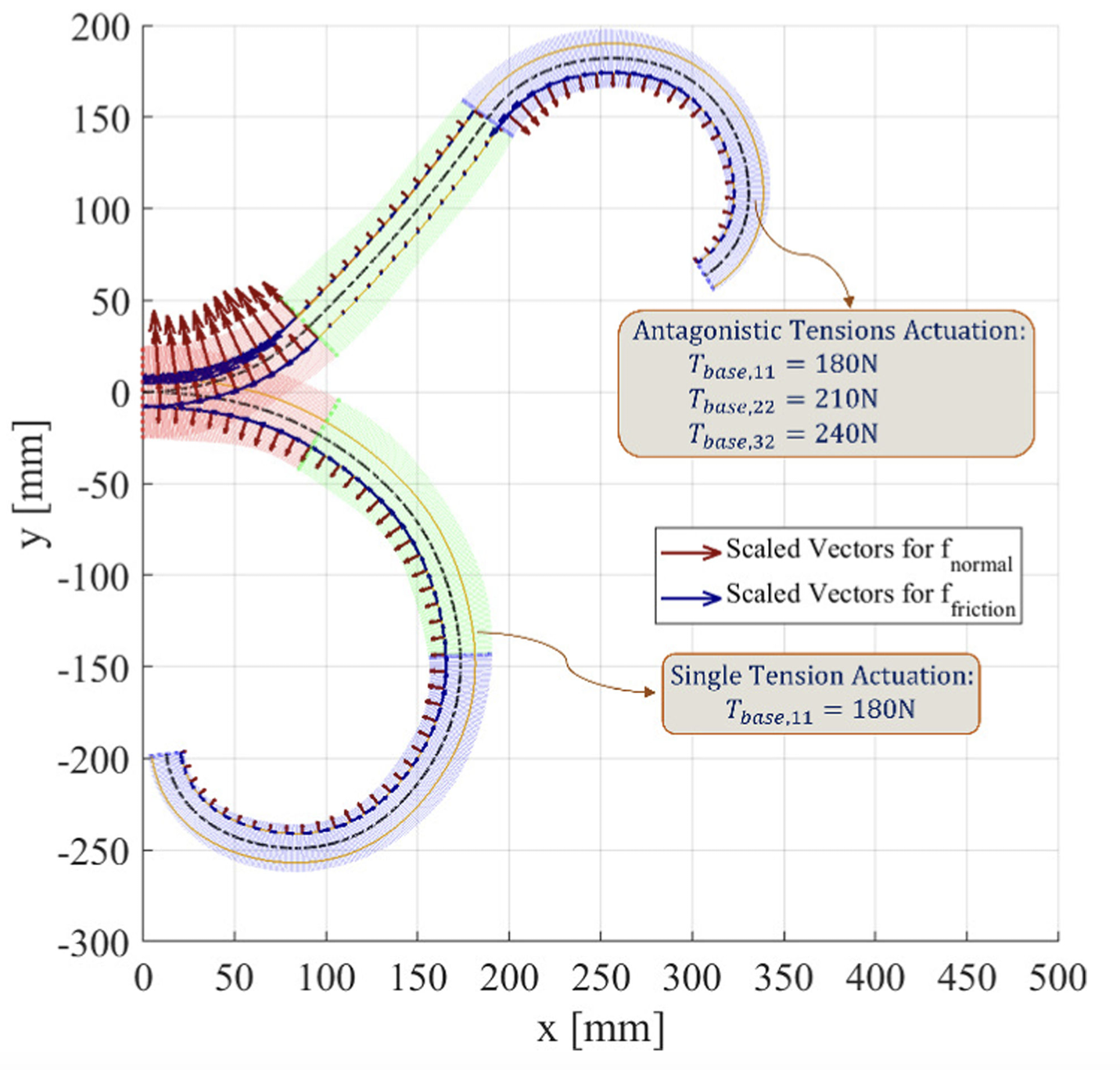 Influence of antagonistic tensions on distributed friction forces of multisegment tendon-driven continuum manipulators with irregular geometryIEEE/ASME Transactions on Mechatronics, 2022
Influence of antagonistic tensions on distributed friction forces of multisegment tendon-driven continuum manipulators with irregular geometryIEEE/ASME Transactions on Mechatronics, 2022 -
-
 Analytical Design of a Pneumatic Elastomer Robot With Deterministically Adjusted StiffnessIEEE robotics and automation letters, 2021
Analytical Design of a Pneumatic Elastomer Robot With Deterministically Adjusted StiffnessIEEE robotics and automation letters, 2021 - Toward Analytical Modeling and Evaluation of Curvature-Dependent Distributed Friction Force in Tendon-Driven Continuum ManipulatorsIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2020



















