Uksang Yoo (유욱상)
Robotics PhD Student at CMU RI

Newell-Simon Hall
Hamerschlag Dr.
Pittsburgh, PA, USA 15213
I am a Ph.D. student at Carnegie Mellon University in the Robotics Institute (RI) co-advised by Jean Oh and Jeffrey Ichnowski. I also work as a research scientist intern with robot learning group at Bosch AI (Summer 2025) and Meta (Fall 2025). As a member of RI’s BIG lab and Momentum lab, my research focuses on leveraging robot hands’ unique morphologies to perform dexterous and contact-rich manipulation tasks in ways that exploit each morphology’s distinct capabilities.
My work spans two main areas: developing methods to utilize robot compliance for dexterous and delicate manipulation, and reasoning about continuous deformations of soft objects during contact-rich interactions. This research combines theoretical foundations in discrete differential geometry, machine learning, and soft body mechanics with practical applications in deploying dexterous robots to the real world.
I received my B.Sc. in Mathematics (2020) and in Mechanical Engineering (2021) at the University of Texas at Austin, where I developed my interest in continuous deformations and continuum structure representation. My research is supported by the NSF Graduate Research Fellowship Program.
news
| Oct 11, 2025 | I gave a rising star talk at the North East Robotics Symposium (NERC)! |
|---|---|
| Sep 29, 2025 | I presented our paper (Oral) at the Conference on Robot Learning (CoRL) on learning soft hand policies! Recording |
| Aug 30, 2025 | Our work on simultaneous vision-based shape estimation and tactile signal reconstruction got accepted to The International Journal of Robotics Research (IJRR)! |
| Aug 01, 2025 | Our work on learning from deformation-based demonstration for dexterous manipulation was accepted to Conference on Robot Learning (CoRL)! |
| May 19, 2025 | I’m co-organizing a ICRA 2025 workshop on Acoustic Sensing and Representations for Robotics Workshop Site! |
| Mar 08, 2025 | Our work on contact-rich manipulation of hair was nominated for best paper at ACM/IEEE International Conference on Human-Robot Interaction (HRI) in Melbourne, Australia! |
| Dec 02, 2024 | Our work on contact-rich hair manipulation for assitive care was accepted to ACM/IEEE International Conference on Human Robot Interaction (HRI)! |
| Nov 26, 2024 | Our work on learning from demonstration with structural priors (Project Site) was selected as a ‘Best Oral Paper’ finalist at IEEE Humanoids 2024! |
| Nov 09, 2024 | I’m co-organizing a CoRL 2024 workshop on lifelong learning for home robots Workshop Site! |
| Sep 27, 2024 | We presented at ICRA@40 on the preliminary results of behavior cloning for clay manipulation and it was featured on IEEE Spectrum |
selected publications
-
 DYMO-Hair: Generalizable Volumetric Dynamics Modeling for Robot Hair ManipulationIn arXiv , 2025
DYMO-Hair: Generalizable Volumetric Dynamics Modeling for Robot Hair ManipulationIn arXiv , 2025 -
-
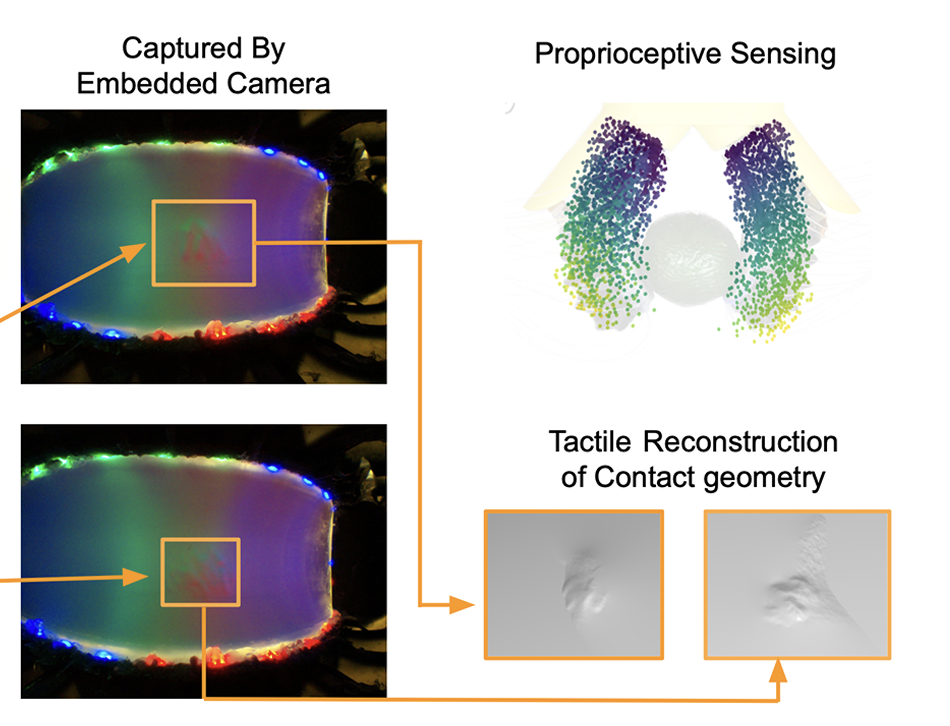 PneuGelSight: Soft Robotic Vision-Based Proprioception and Tactile SensingIn International Journal on Robotics Research (IJRR) , 2025
PneuGelSight: Soft Robotic Vision-Based Proprioception and Tactile SensingIn International Journal on Robotics Research (IJRR) , 2025 -
 SonicBoom: Contact Localization Using Array of MicrophonesIn IEEE robotics and automation letters , 2025
SonicBoom: Contact Localization Using Array of MicrophonesIn IEEE robotics and automation letters , 2025 -
 MOE-Touch More Deformation: Shape-Based Soft Robotic Contact Estimation for ManipulationIn [Under Review] , 2024
MOE-Touch More Deformation: Shape-Based Soft Robotic Contact Estimation for ManipulationIn [Under Review] , 2024 -
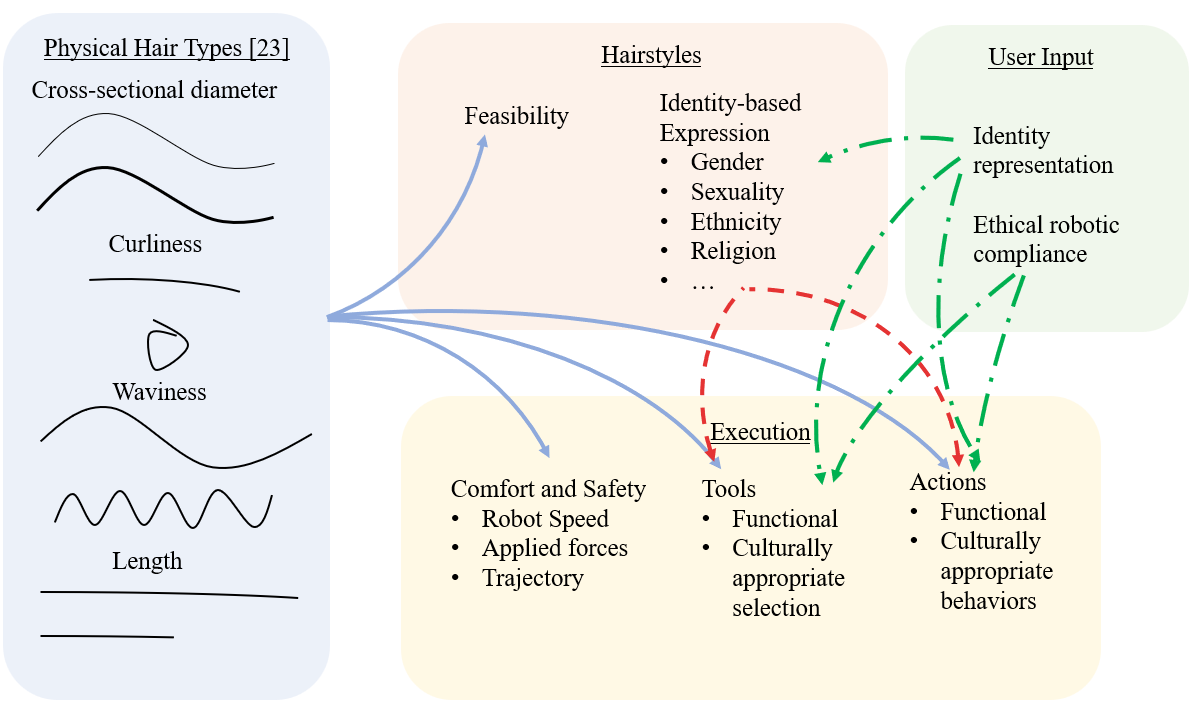 Inclusion in Assistive Haircare Robotics: Practical and Ethical Considerations in Hair ManipulationIn Third Workshop on Inclusive HRI , 2024
Inclusion in Assistive Haircare Robotics: Practical and Ethical Considerations in Hair ManipulationIn Third Workshop on Inclusive HRI , 2024 -
 MOE-Hair: Toward Soft and Compliant Contact-rich Hair Manipulation and Care [Best LBR at HRI 2024]In Late Breaking Report, International Conference on Human-Robot Interaction (HRI) , 2024[Best LBR]
MOE-Hair: Toward Soft and Compliant Contact-rich Hair Manipulation and Care [Best LBR at HRI 2024]In Late Breaking Report, International Conference on Human-Robot Interaction (HRI) , 2024[Best LBR] -
 POE: Acoustic Soft Robotic Proprioception for Omnidirectional End-effectorsIn 2024 IEEE International Conference on Robotics and Automation (ICRA) , 2024
POE: Acoustic Soft Robotic Proprioception for Omnidirectional End-effectorsIn 2024 IEEE International Conference on Robotics and Automation (ICRA) , 2024 -
 Toward Zero-Shot Sim-to-Real Transfer Learning for Pneumatic Soft Robot 3D Proprioceptive SensingIn 2023 IEEE International Conference on Robotics and Automation (ICRA) , 2023
Toward Zero-Shot Sim-to-Real Transfer Learning for Pneumatic Soft Robot 3D Proprioceptive SensingIn 2023 IEEE International Conference on Robotics and Automation (ICRA) , 2023 -
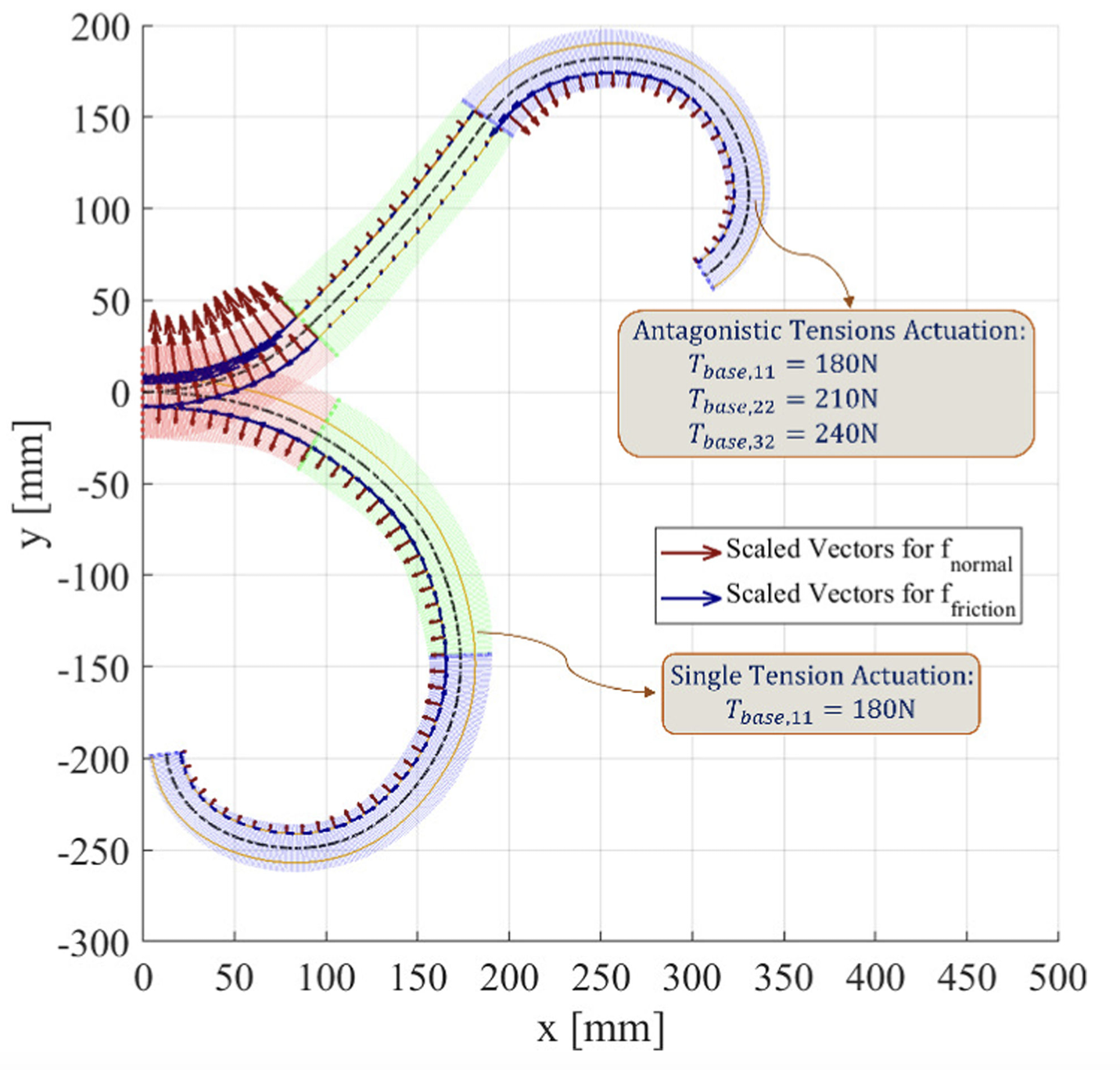 Influence of antagonistic tensions on distributed friction forces of multisegment tendon-driven continuum manipulators with irregular geometryIEEE/ASME Transactions on Mechatronics, 2022
Influence of antagonistic tensions on distributed friction forces of multisegment tendon-driven continuum manipulators with irregular geometryIEEE/ASME Transactions on Mechatronics, 2022 -
-
 Analytical Design of a Pneumatic Elastomer Robot With Deterministically Adjusted StiffnessIEEE robotics and automation letters, 2021
Analytical Design of a Pneumatic Elastomer Robot With Deterministically Adjusted StiffnessIEEE robotics and automation letters, 2021 - Toward Analytical Modeling and Evaluation of Curvature-Dependent Distributed Friction Force in Tendon-Driven Continuum ManipulatorsIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2020















